¿Qué es esto?
En todo proyecto de robots autónomos no puede faltar el robot seguidor de línea. Este proyecto te permite. Este proyecto es un robot autónomo que tiene como misión seguir un linea en el piso y que logra detectando la línea con sus sensores infrarrojos y rectificando así su ruta.
Armado
- PLATAFORMA DE DESARROLLO V1.0
- MOTOREDUCTORES CON LLANTAS
- CHASIS DE ACRÍLICO
- 1 CONTROL DE MOTORES DC MINI VICTORY L298N
- 1 POWERBANK
- 1 VELCRO PARA POWERBANK
- 1 RUEDA LOCA
- CABLE USB POWERBANK PARA PROTOBOARD
- 1 MÓDULO RECEPTOR INFRARROJO
- 1 MÓDULO TRANSMISOR INFRARROJO
- 8 CABLES y TORNILLERIA
- ADITAMENTO PARA SUJECIÓN DE SENSORES SEGUIDORES DE LÍNEA
- 2 SENSORES INFRARROJOS DETECTORES DE LÍNEA
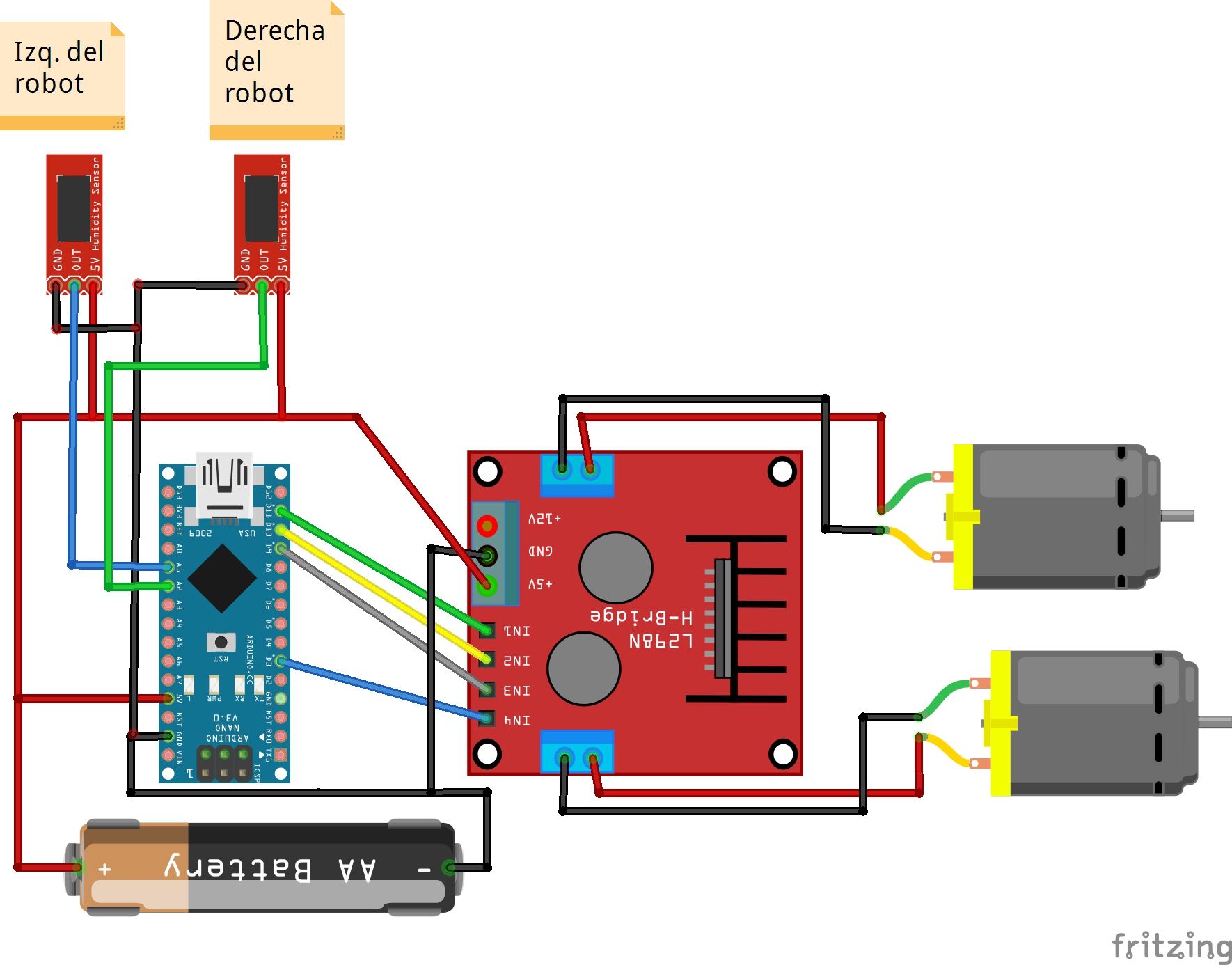
DIAGRAMA DE CONEXIONES
Hazlo tú mismo
Se carga el programa CARRO-ROBOT en el Arduino NANO, se arma el chasis del carro y se conectan los cables correspondientes de acuerdo al diagrama. Como se observa no se requieren muchas conexiones.
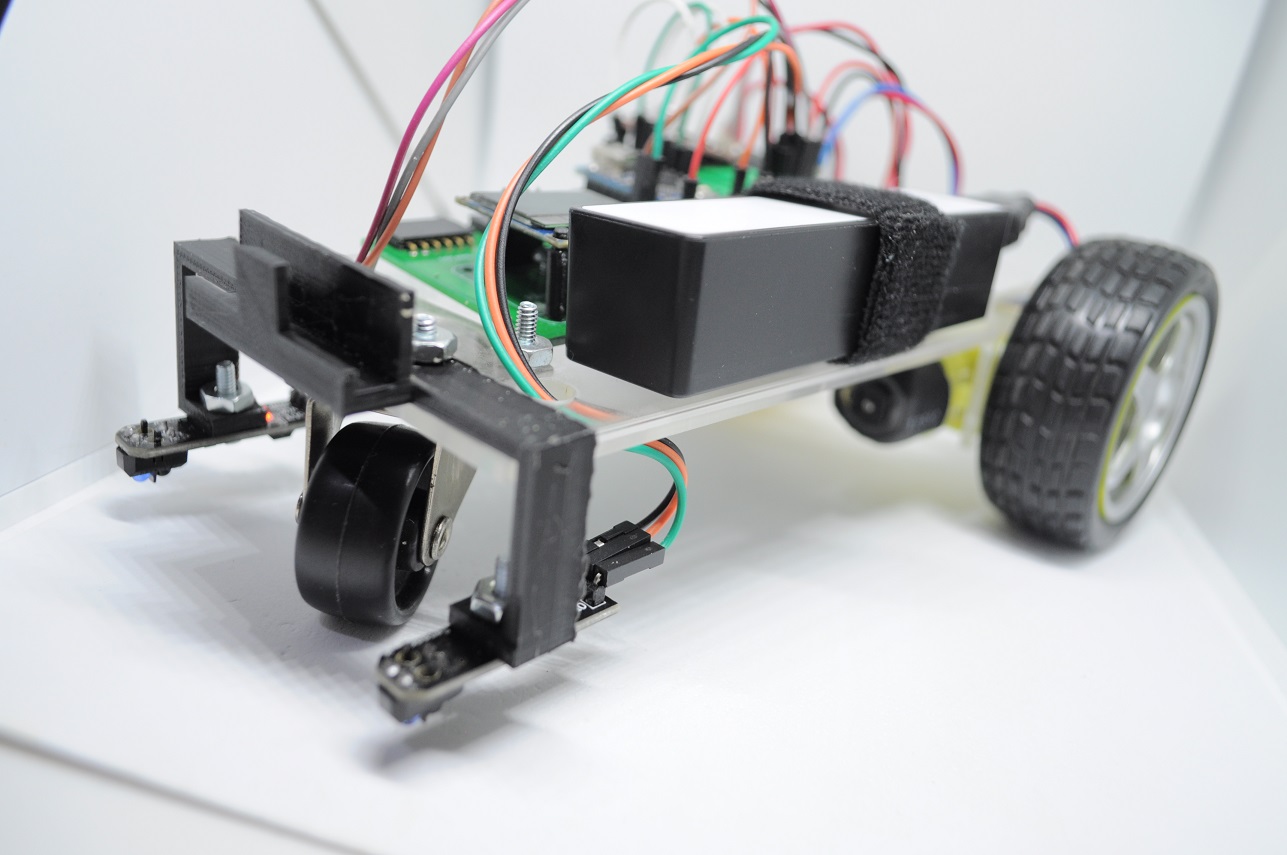
FIGURA DEL PROYECTO