¿Qué es esto?
Para este proyecto utilizaremos el carro robot para detectar obstáculos y evadirlos. El sistema es totalmente autónomo y depende de su rutinas de programación para evitar chocar con objetos usando un sensor ultrasónico para identificar la distancia de objetos al frente.
Armado
- PLATAFORMA DE DESARROLLO V1.0
- MOTOREDUCTORES CON LLANTAS
- CHASIS DE ACRÍLICO
- 1 CONTROL DE MOTORES DC MINI VICTORY L298N
- 1 POWERBANK
- 1 VELCRO PARA POWERBANK
- 1 RUEDA LOCA
- CABLE USB POWERBANK PARA PROTOBOARD
- 1 MÓDULO RECEPTOR INFRARROJO
- 1 MÓDULO TRANSMISOR INFRARROJO
- 8 CABLES y TORNILLERIA
- ADITAMENTO PARA SUJECIÓN DE SENSOR ULTRASÓNICO
- SENSOR ULTRASÓNICO
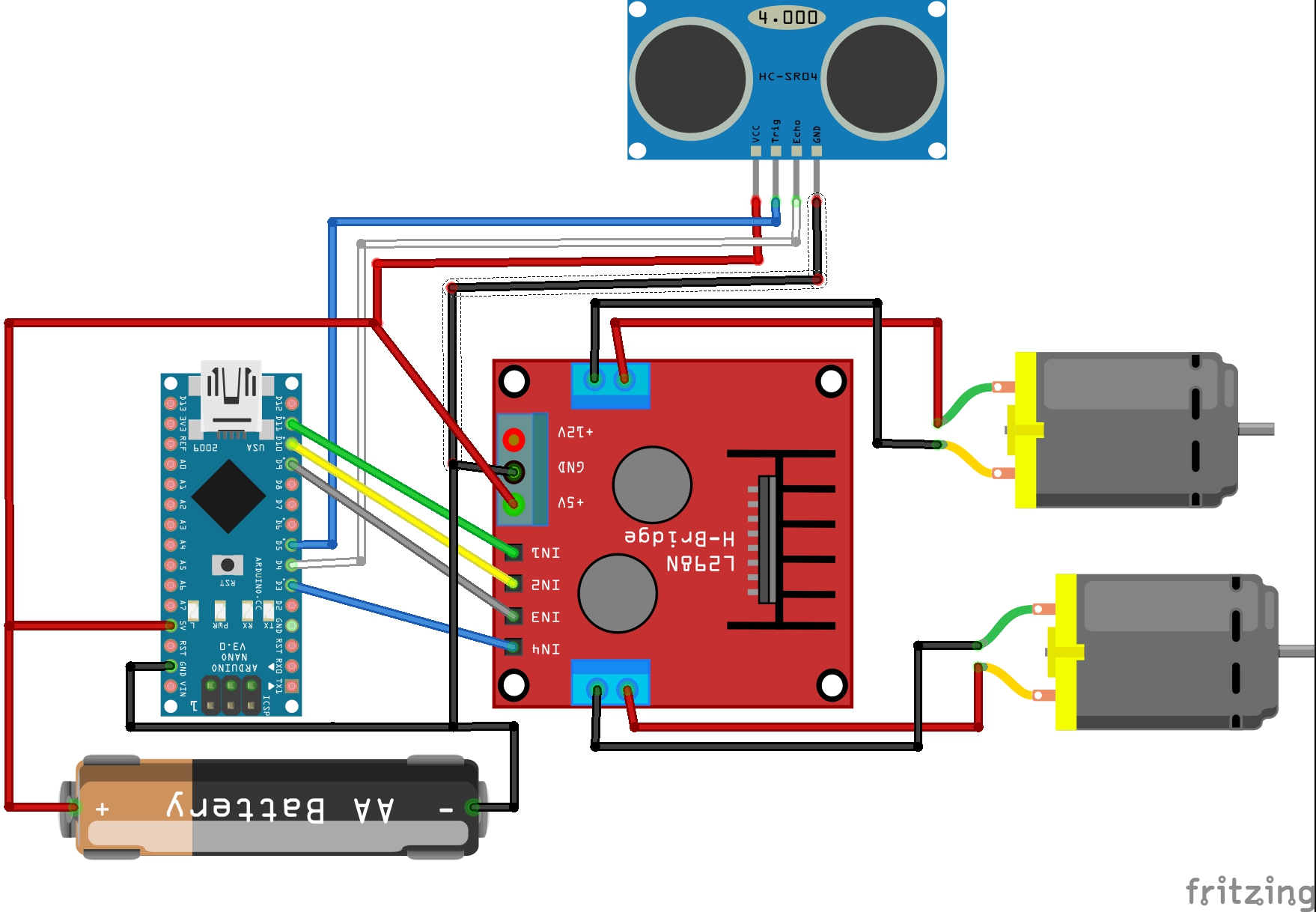
DIAGRAMA DE CONEXIONES
Hazlo tú mismo
Se carga el programa CARRO-ROBOT-EVASOR-OBSTACULOS en el Arduino NANO, se arma el chasis del carro y se conectan los cables correspondientes de acuerdo al diagrama. Como se observa no se requieren muchas conexiones.
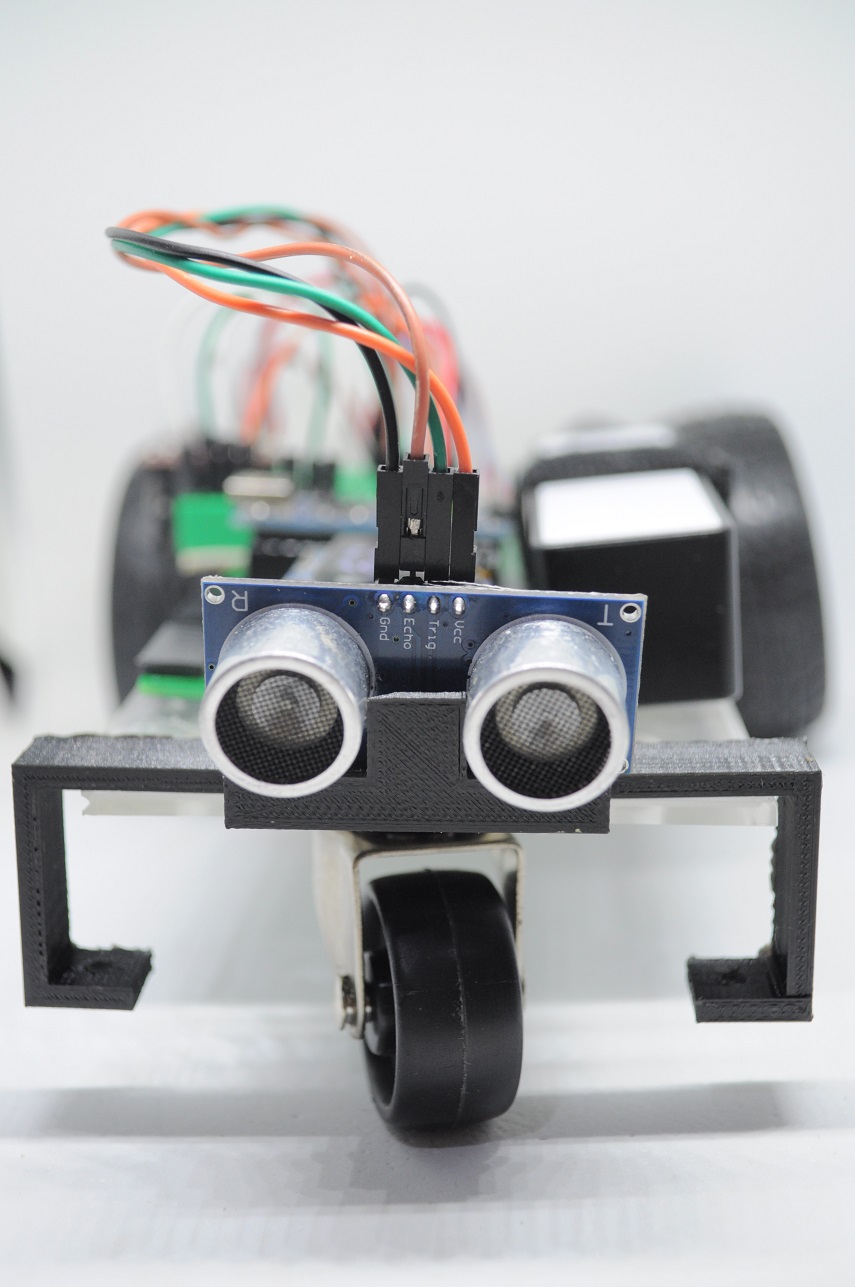
FIGURA DEL PROYECTO